Contact
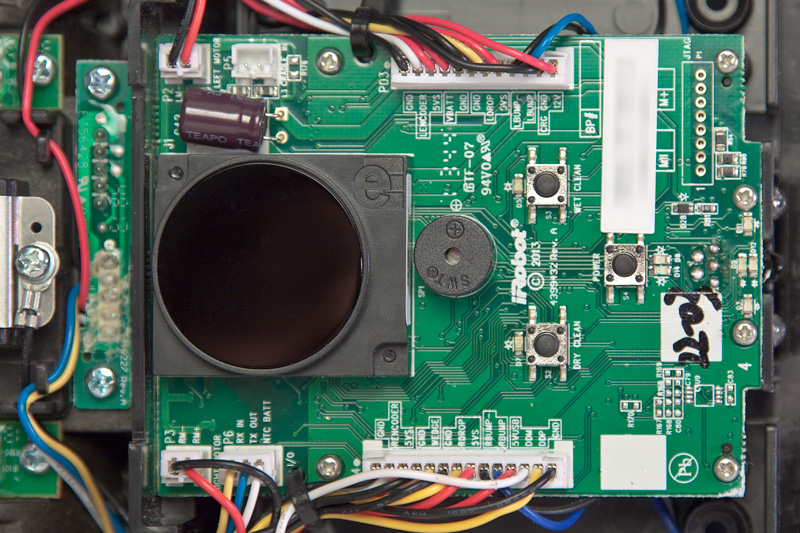
Unbricking of dead Braava 380 floor cleaning robot
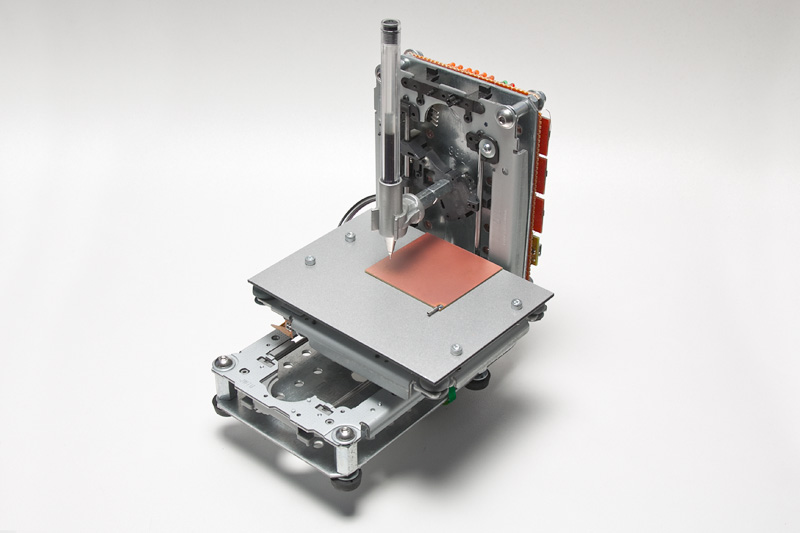
CNC 3 axis plotter from old DVD’s
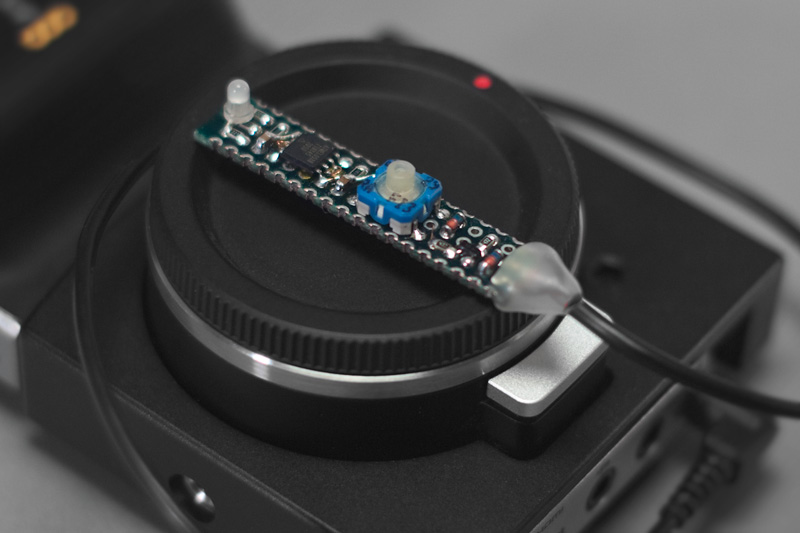
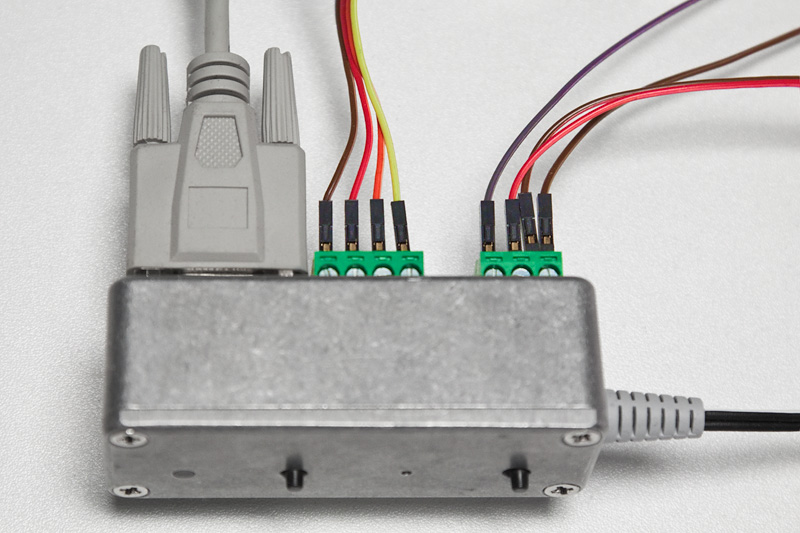
LANC controller for Black Magic Design Cameras
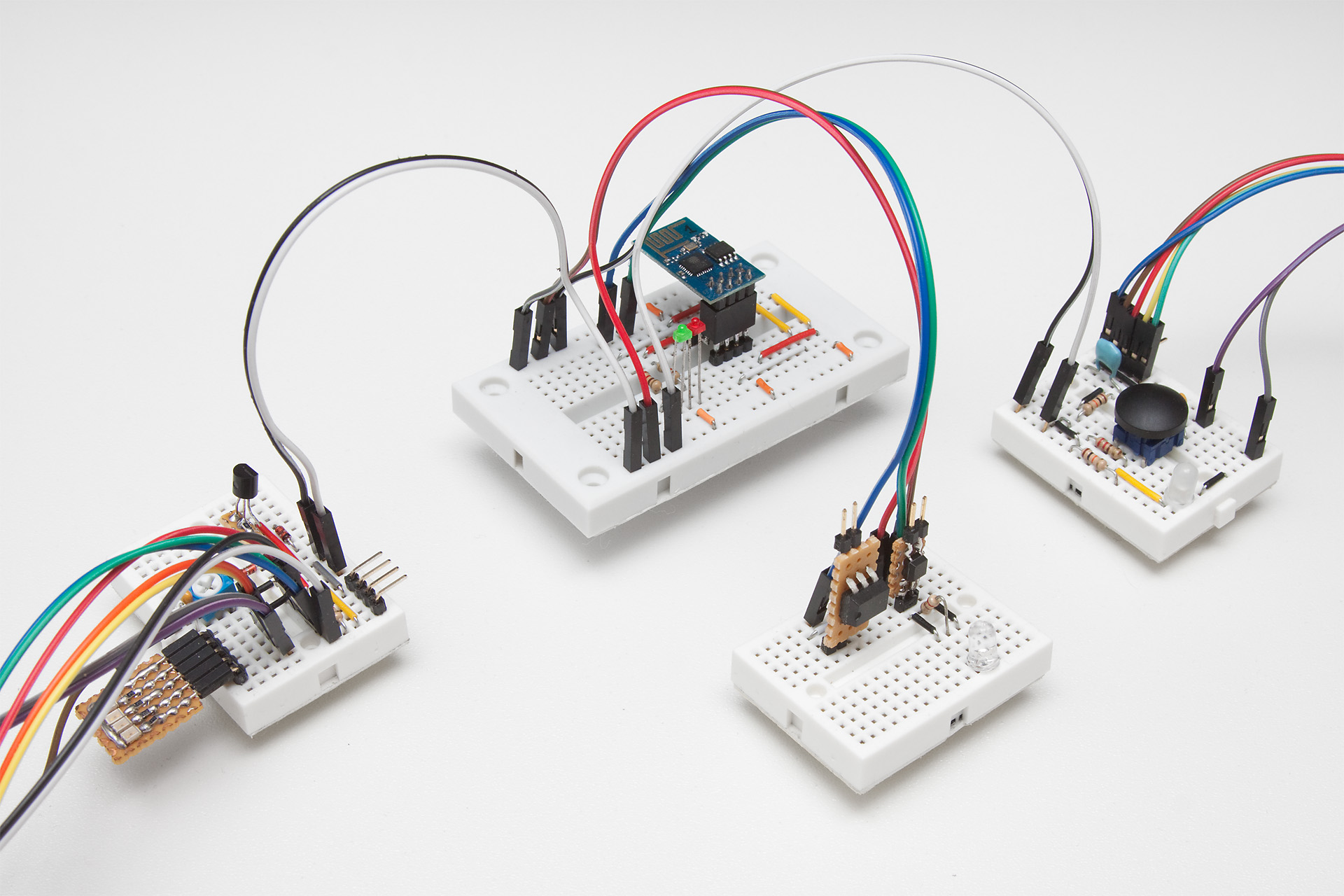
MQTT clients: camera relase + flash fire.
Dumping firmware from operating Braava 380 floor cleaning robot
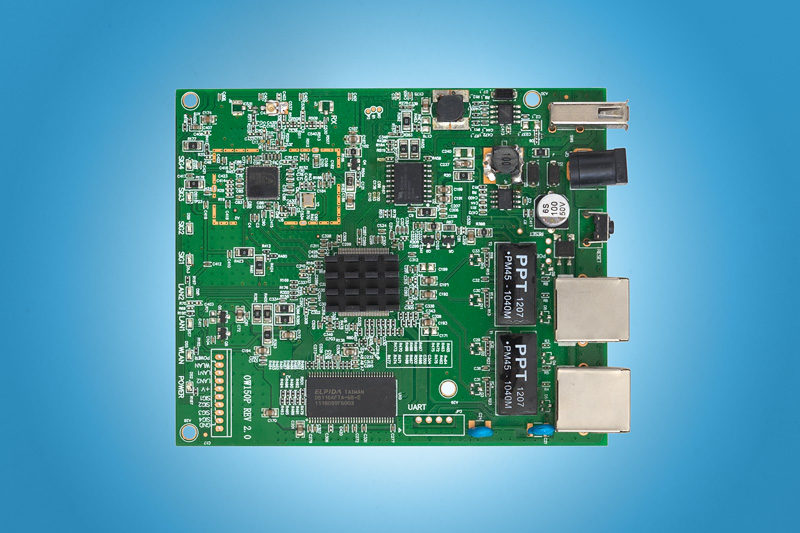
OW150P rev 2.0 board OpenWrt image build
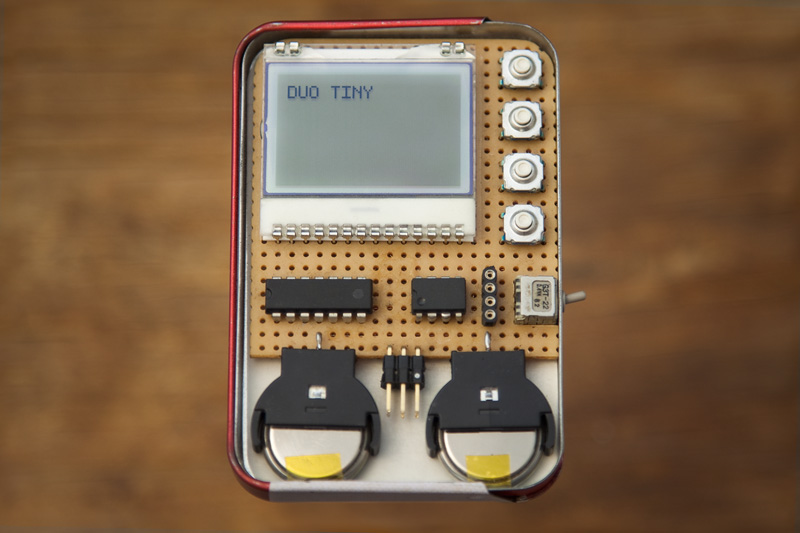
DUO Tiny – pocket computer
Sharp image reflection in blurred mirror
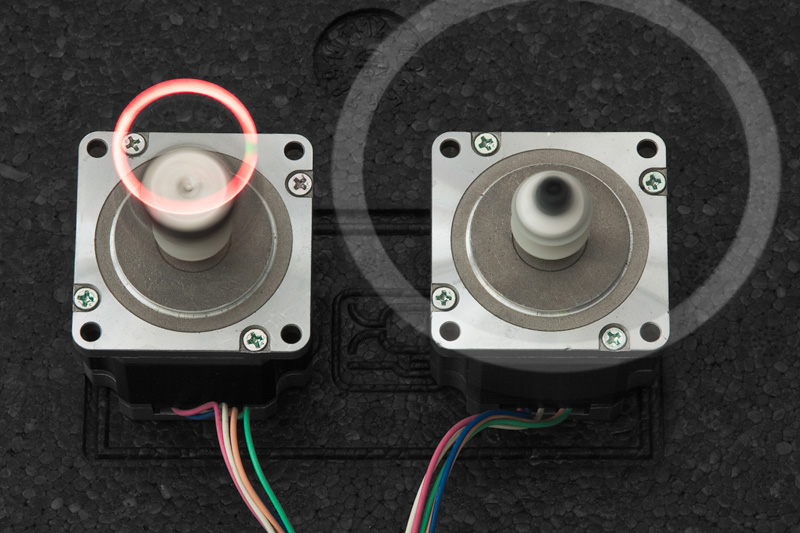
Atmel AN446 – stepper motor controller
sensors: magnetic or infrared
Posts navigation
1
2
Next Page
»